
铣工考试
工件在空间共有六个自由度,分别是沿X、Y、Z轴移动和绕X、Y、Z轴转动。
题目
工件在空间共有六个自由度,分别是沿X、Y、Z轴移动和绕X、Y、Z轴转动。
如果没有搜索结果,请直接 联系老师 获取答案。
如果没有搜索结果,请直接 联系老师 获取答案。
相似问题和答案
第1题:

A.x轴
B.y轴
C.z轴
D.直线x=y=z
B.y轴
C.z轴
D.直线x=y=z
答案:C
解析:
第2题:
确定机床X、Y、Z坐标时,规定平行于机床主轴的刀具运动坐标为(),取刀具远离工件的方向为()方向。
- A、X轴,正
- B、Y轴,正
- C、Z轴,正
- D、Z轴,负
正确答案:C
第3题:
在数控机床上,确定坐标轴的先后顺序为()。
A、X轴—Y轴—Z轴
B、Z轴—X轴—Y轴
C、Z轴—Y轴—X轴
D、X轴—Z轴—Y轴
参考答案:B
第4题:
轴测轴的X、Y、Z轴不需要对应三视图中的X、Y、Z轴
正确答案:正确
第5题:
G90G01X10表示的是机床()。
- A、沿X轴移动10m
- B、沿Y轴移动10mm
- C、到达工件坐标系X10,Y坐标保持原值
- D、沿Z轴移动10mm
正确答案:B
第6题:
在yOz平面上的直线z=y绕z轴旋转一周之后得到的曲线方程为( )。
A.z2=x2+y2
B.x2=y2+z2
C.x2+y2-z2=1
D.x2+y2-z2=-1
B.x2=y2+z2
C.x2+y2-z2=1
D.x2+y2-z2=-1
答案:A
解析:
直线绕z轴旋转所得为对顶圆锥,中心在原点。绕z轴旋转yOz平面上的直线z=y,将直

第7题:
数控机床坐标轴确定的步骤为()。
- A、X—Y—Z--
- B、X—Z—Y–
- C、Z—X—Y—
正确答案:C
第8题:
在正立方体的ABCD面上沿BD方向作用一力F,则该力()。
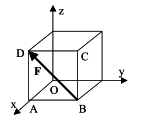
A.对x、y轴之矩相等
B.对y、z轴之矩相等
C.对x、y、z轴之矩全不等
D.对x、y、z轴之矩全相等
正确答案:B
第9题:
任何工件在空间直角坐标系中,都有六个自由度,没X、Y、Z三个座标轴的移动和绕三个座标轴的移动。因此,要确定工件在支具中的准确位置,必须用各种定位元件的适当分布来限制工件的()。
正确答案:六个自由度
第10题:
在顶视图中要把物体移动到右侧应选择哪个轴向()
- A、Y轴
- B、Z轴
- C、Y、Z轴
- D、X轴
正确答案:D