
电子与通信技术
信号1x(t)=u(t)-u(t-1)的拉普拉斯变换为()A、(1-e-s)/sB、(1-es)/sC、s(1-e-s)D、s(1-es)
题目
信号1x(t)=u(t)-u(t-1)的拉普拉斯变换为()
- A、(1-e-s)/s
- B、(1-es)/s
- C、s(1-e-s)
- D、s(1-es)
相似问题和答案
第1题:
A、G和T
B、A和G
C、T和C
D、C和U
E、T和U
第2题:
有如下函数模板: template<typename T,typename U> T cast (U u){ return u;} 其功能是将U 类型数据转换为T类型数据。已知i为int 型变量,下列对模板函数cast的调用中正确的是( )。
A.cast (i);
B.cast <>(i);
C.cast<char*,int>(i);
D.cast<double,int>(i);
第3题:
A. UΩ
B. uΩ(t)
C. |uΩ(t)|
D. Ω
第4题:

B.u(t)=2(1-e-0.1t) * 1(t)
C.u(t)=[2(1-e-10t)-2] *1(t)
D.u(t)=2(1-e-10t) * 1(t)-2* 1(t-2)
第5题:
经元组演算R={t| u)(v)(A(u)∧B(v)∧u(2)=f∧t[1]=u[3]∧t[2]=u[2]∧t[3]=u[1]∧t[4]=v[2])后的结果为(20)。
u)(v)(A(u)∧B(v)∧u(2)=f∧t[1]=u[3]∧t[2]=u[2]∧t[3]=u[1]∧t[4]=v[2])后的结果为(20)。
A.
B.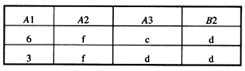
C.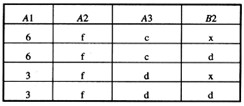
D.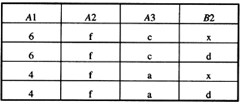
解析:本题考查数据库中的关系运算。关系演算运算是以数理逻辑中的谓词演算为基础,用公式表示关系运算的条件。关系演算按所用到的变量不同,可以分为元组关系演算和域关系演算。题目中给出的是元组关系演算。根据题目给出的演算R,我们很容易可以求得结果为C。
第6题:
第7题:
有如下函数模板: template<typename T.typename U> T east(U u)i return u;} 其功能是将U类型数据转换为T类型数据。已知i为int型变量,下列对模板函数cast的调用中正确的是( )。
A.cast(i);
B.cast<>(i);
C.east<char*,int>(i);
D.east<double,int>(i);
本题考查函数模板的基本运用,属于基础知识。函数模板实际上是建立一个通用函数,其函数类型和形参类型不具体指定,用一个虚拟的类型代表,这个通用函数就是函数模板。函数模板可以设定默认参数,这样在调用模板函数时就可以省略实参,函数模板的实例就是一个函数的定义。所以本题答案为D。
第8题:
A、Umsin(ωt)和Umcos(ωt)
B、U1sin(ω和t)U2sin(ωt)(U1≠U2)
C、U1sin(ω和t)U2cos(ωt)(U1≠U2)
D、Umsin(ω1t)和Umcos(ω2t)(ω1≠ω2)
第9题:


第10题:
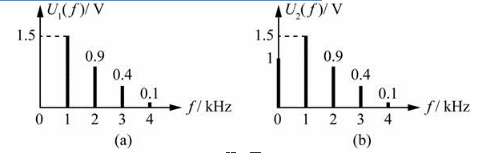
B.u1(t)和u2(t)都是离散时间函数
C.u1(t)和u2(t)都是周期性连续时间函数
D.u1(t)是非周期性时间函数,u2(t)是周期性时间函数