
机械工程
相似问题和答案
第1题:
在计算机构自由度时,若计入虚约束,则机构自由度数( )。
A.增多
B.减小
C.不变
第2题:
计算下列机构的自由度,若有虚约束、复合铰链和局部自由度,需指出。 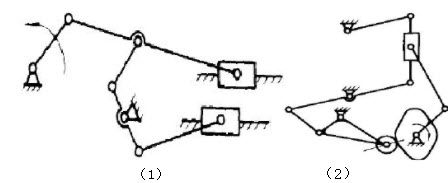

略
第3题:
此题为判断题(对,错)。
第4题:
计算下列机构的自由度,并指出存在的复合铰链、虚约束或局部自由度。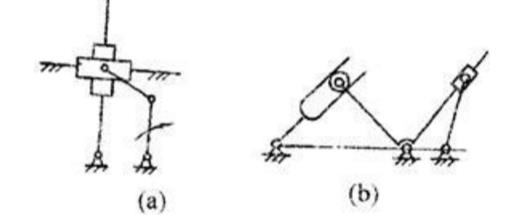
(a)
a中存在复合铰链,5个构件组成复合铰链,共有4个低副。
(b)
b中滚子为局部自由度。
略
第5题:
计算图示机构的自由度,若含有复合铰链,局部自由度和虚约束请明确指出。 
F处为复合铰链,H(或I) 处为虚约束,则
略
第6题:
B.计入运动副数
C.“焊死”
D.去除
第7题:
简述机构具有确定相对运动的条件,计算机构自由度(若有复合铰链、局部自由度、虚约束,请指出),并判断机构运动是否确定。 
机构具有确定相对运动的条件是机构的自由度数目等于机构中原动件的数目。
即W=F>0。
机构中,n=9,pL=12,pH=1
F=3n-2pL-pH=2=W>0,所以机构运动确定。
C处复合铰链,E处虚约束,F处局部自由度。
略
第8题:
此题为判断题(对,错)。
第9题:
计算图示机构的自由度,并指出复合铰链、局部自由度、 虚约束,判断该机构运动是否确定。
F.3n-2PL-PH=3×6-2×8-1=1
F处为虚约束;B处为复合铰链;G处为局部自由度。
机构运动确定。
略
第10题:
指出下两图所示各机构的复合铰链、局部自由度和虚约束,计算机构的自由度,并判断它们是否具有确定的运动。 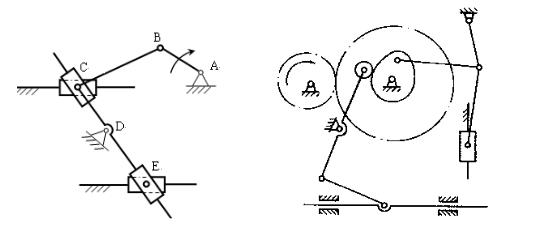
(1)C点有复合铰链
E点为虚约束
F=3×5-2×7=1
有确定的运动。
(2)图中有一处虚约束,一处复合铰链,一处局部自由度。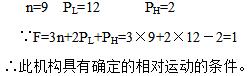
略