
一级注册建筑师
要增加控制系统的带宽和增加增益,减小稳态误差宜采用()A、相位超前的串联校正B、相位滞后的串联校正C、局部速度反馈校正D、滞后-超前校正
题目
要增加控制系统的带宽和增加增益,减小稳态误差宜采用()
- A、相位超前的串联校正
- B、相位滞后的串联校正
- C、局部速度反馈校正
- D、滞后-超前校正
相似问题和答案
第1题:
系统类型、开环增益对系统稳态误差的影响为()
A.系统型次越高,开环增益K越大,系统稳态误差越小
B.系统型次越低,开环增益K越大,系统稳态误差越小
C.系统型次越高,开环增益K越小,系统稳态误差越小
D.系统型次越低,开环增益K越小,系统稳态误差越小
第2题:
A 、一型系统在跟踪斜坡输入信号时无误差 ;
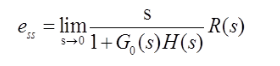
B 、稳态误差计算的通用公式是20()lim 1()()ss s s R s e G s H s →=+;
C 、增大系统开环增益K 可以减小稳态误差;
D 、增加积分环节可以消除稳态误差,而且不会影响系统稳定性。
第3题:
A、系统型次λ越高,开环增益K越大,系统稳态误差越小
B、系统型次λ越低,开环增益K越大,系统稳态误差越小
C、系统型次λ越高,开环增益K越小,系统稳态误差越小
D、系统型次λ越低,开环增益K越小,系统稳态误差越小
第4题:
B. 降低开环增益
C. 增加微分环节和降低开环增益
D. 减少微分环节和降低开环增益
开环传递函数G0(s)H(s)表示为:
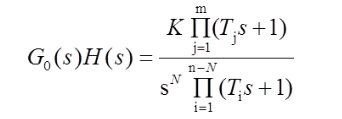
式中,K为系统的开环放大系数或开环增益;N表示开环传递函数所包含的积分环节数。则提高开环增益,增加积分环节数目,可以减小稳态误差。
第5题:
A.干扰抵消增益
B.复用增益
C.阵列增益
D.分集增益
第6题:
适当的提高系统的开环增益可以减小稳态误差。()
第7题:
A 稳态误差;
B 稳定性;
C 系统阻尼;
D 开环增益。
第8题:
A、一型系统在跟踪斜坡输入信号时无误差
B、增大系统开环增益K可以减小稳态误差
C、增加积分环节可以消除稳态误差,而且不会影响系统稳定性
第9题:
B. 相位滞后的串联校正
C. 局部速度反馈校正
D. 滞后—超前校正
第10题:
B.相位滞后的串联校正
C.局部速度反馈校正
D.滞后一超前校正