
工学
如果没有搜索结果,请直接 联系老师 获取答案。
相似问题和答案
第1题:
简述制动防抱死系统原理(ABS)。
正确答案:①制动防抱死系统由传感器、电子控制器(ABSECU)、执行器组成。
②在汽车进行紧急制动和易打滑的路面上进行常规制动时,由轮速传感器检测到各车轮的滑移量,通过电子控制器的分析、运算,把控制信号传到执行器,适时并调解制动系统的制动压力,减少车轮的滑移量,防止车轮制动抱死,确保制动时汽车的稳定性、制动可靠性和行驶安全性。
第2题:
简述电控悬架系统工作原理。
正确答案:利用传感器(包括开关)把汽车行驶时路面的状况和车身的状态进行检测,将检测信号输入计算机进行处理,计算机通过驱动电路控制悬架系统的执行器动作,完成悬架特性参数的调整。
第3题:
简述电控动力转向系统的工作原理。
答案:工作原理如图,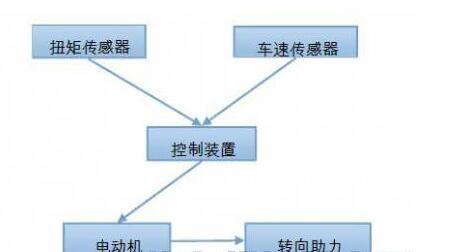 汽车转向时,扭矩传感器和车速传感器将检测到的扭矩、向信号及车速信号传给ECU,ECU根据扭矩传感器的信号和车速信号确定电动机扭矩的大小和方向,电动机再通过离合器、减速机构等把此扭矩传递给扭杆,最终起到为驾驶员提供转向助力的效果,使汽车转向更轻便。车速越低助力越大,车速越高助力越小。当车速大于-定值时,取消助力,将直流电动机反接制动,目的是在汽车高速行驶时增加操作方向盘的手感,保证行驶安全。EPS系统本身是一个比较复杂的非线性随动系统,容易受到车速、扭矩测量装置的精度与灵敏度、路况产生的系统扰动等因素的影响,因此EPS系统对实时性要求较高。
汽车转向时,扭矩传感器和车速传感器将检测到的扭矩、向信号及车速信号传给ECU,ECU根据扭矩传感器的信号和车速信号确定电动机扭矩的大小和方向,电动机再通过离合器、减速机构等把此扭矩传递给扭杆,最终起到为驾驶员提供转向助力的效果,使汽车转向更轻便。车速越低助力越大,车速越高助力越小。当车速大于-定值时,取消助力,将直流电动机反接制动,目的是在汽车高速行驶时增加操作方向盘的手感,保证行驶安全。EPS系统本身是一个比较复杂的非线性随动系统,容易受到车速、扭矩测量装置的精度与灵敏度、路况产生的系统扰动等因素的影响,因此EPS系统对实时性要求较高。
汽车转向时,扭矩传感器和车速传感器将检测到的扭矩、向信号及车速信号传给ECU,ECU根据扭矩传感器的信号和车速信号确定电动机扭矩的大小和方向,电动机再通过离合器、减速机构等把此扭矩传递给扭杆,最终起到为驾驶员提供转向助力的效果,使汽车转向更轻便。车速越低助力越大,车速越高助力越小。当车速大于-定值时,取消助力,将直流电动机反接制动,目的是在汽车高速行驶时增加操作方向盘的手感,保证行驶安全。EPS系统本身是一个比较复杂的非线性随动系统,容易受到车速、扭矩测量装置的精度与灵敏度、路况产生的系统扰动等因素的影响,因此EPS系统对实时性要求较高。
第4题:
简述电控储压式(共轨式)喷油系统的组成、特点和工作原理。
正确答案:组成:高压供油泵、储压器、喷油嘴及ECU和各种传感器。
特点:1.无二次喷射制约地实现高压化和与转速独立的最佳压力自由控制;2.针阀升程能直接控制;3.精密的喷射率控制,且无机械结构的限制;4.喷射时刻可完全电子化;5.可对喷射系统的构成要素、可燃混合气的雾化时间空间、压力的形成和控制、喷射量/喷射时刻的控制等所有功能进行分解。
特点:1、喷油压力柔韧可调2、喷射压力高3、可柔性控制喷油规律4、控制精度高工作原理:由高压供油泵将燃料加压后储存在储压室中,利用电磁阀控制喷油嘴的背压,从而决定喷射开始和结束的系统.燃料压力由设在储压室内的压力传感器和高压油泵中的电磁阀控制.
第5题:
简述电控ABS的工作原理。
正确答案: 电控ABS的核心是电子控制单元(ECU),它通过传感器监视汽车制动时车轮是否抱死。在一般的制动情况下,驾驶员踩在制动踏板上的力较小,车轮不会被抱死,ECU无控制信号输出,这时,就如同普通的制动系统,制动力完全由驾驶员踩在制动踏板上的力来控制。
在紧急制动或是在松滑路面行驶时制动,车轮将要被抱死的情况下,ECU就会输出控制信号,通过执行机构(即制动压力调节器)控制制动器的制动力,使车轮不被抱死。
第6题:
简述ABS的工作原理。
正确答案: ABS装置是通过安装在各车轮或传动轴上的转速,传感器等不断检测的转速,由计算机计算出当时车轮的滑移率(通过滑移率可知车轮是否抱死)并与理想的滑移率比较,做出增大或减小制动器制动压力的决定,命令执行机构及时调整制动压力,达到理想制动状态。
第7题:
简述电控自动变速器多片离合器中的安全阀工作原理。
正确答案:当压力油进入液压缸内时,钢球在油压的作用下压紧在阀座上,安全阀处于关闭状态,保证了油压缸的密封。
当液压缸内的压力油通过油田排出时,缸体内的液压力下降,安全阀的钢球在离心力的作用下离开阀座,阀处于开启状态,残留在缸内的液压油因离心力的作用从安全阀的阀孔排出,使离合器得以彻底分离。
第8题:
简述电控燃油喷射系统的基本工作原理?
ECU不断接受来自多个传感器的信号,并根据传感器的信号确定发动机所处的工况和当时的进气量,然后依据当时的工况确定空燃比,并根据进气量和空燃比计算所需的喷油量,进而通过控制喷油器的喷油脉宽实现喷油量的控制。
略
第9题:
简述电控ABS是如何工作的(工作原理)?
正确答案:电控ABS的核心是电子控制单元ECU,它通过传感器监视汽车制动时车轮是否抱死。在一般的制动情况下,驾驶员踩在制动踏板上的力较小,车轮不会被抱死,ECU无控制信号输出,就象普通制动系统,制动力完全由驾驶员踩在制动踏板上的力来控制,在紧急制动或是在松滑路面行驶时制动,车轮将要被抱死时,ECU就会输出控制信号,通过执行机构控制制动器的制动力,使车轮不被抱死。
第10题:
简述电控半主动悬架的结构和工作原理。
正确答案:结构:传感器、电子控制单元(ECU)、执行器等
工作原理:利用传感器把汽车行驶路面的状况和车身的状态进行检测,检测到的信号经输入接口电路后,传输给计算机进行处理,再通过驱动电路控制悬架系统的执行器动作,完成悬架特性参数的调整。