
工学
单选题通过对有限元的态体分析,可以揭示结点外载荷与结点位移的关系,从而用来求解()。A 结点力B 结点动变形C 结点位移D 结点动应力
题目
单选题
通过对有限元的态体分析,可以揭示结点外载荷与结点位移的关系,从而用来求解()。
A
结点力
B
结点动变形
C
结点位移
D
结点动应力
如果没有搜索结果,请直接 联系老师 获取答案。
如果没有搜索结果,请直接 联系老师 获取答案。
相似问题和答案
第1题:
对于一般的树结构,可以采用孩子-兄弟表示法,即每个结点设置两个指针域,一个指针(左指针)指示当前结点的第一个孩子结点,另一个指针(右指针)指示当前结点的下一个兄弟结点。某树的孩子-兄弟表示如下图所示。以下关于结点D与E的关系的叙述中,正确的是( )。
A.结点D与结点E是兄弟B.结点D与结点E的祖父结点C.结点E的父结点与结点D的父结点是兄弟D.结点E的父结点与结点D是兄弟
正确答案:D
第2题:
双向循环链表中,p指向表中某结点,则通过p可以访问到p所指结点的直接后继结点和直接前驱结点。
A对
B错
对
略
第3题:
得到单元结点力同结点位移之间的关系,即单元刚度矩阵( )。
此题为判断题(对,错)。
正确答案:正确
第4题:
用结点法求解静定平面桁架内力时,取一个结点最多可以求解()个独立未知数。
- A、1
- B、2
- C、3
- D、4
正确答案:B
第5题:
图示超静定结构用位移法求解,结点角位移的个数是()。 
A 2
B 3
C 4
D 5
C
略
第6题:
对于一般的树结构,可以采用孩子-兄弟表示法,即每个结点设置两个指针域,一个指针(左指针)指示当前结点的第一个孩子结点,另一个指针(右指针)指示当前结点的下一个兄弟结点。某树的孩子-兄弟表示如下图所示。以下关于结点D与E的关系的叙述中,正确的是(40)。
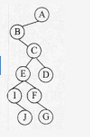
A. 结点D与结点E是兄弟
B. 结点D与结点E的祖父结点
C.结点E的父结点与结点D的父结点是兄弟
D.结点E的父结点与结点D是兄弟
B. 结点D与结点E的祖父结点
C.结点E的父结点与结点D的父结点是兄弟
D.结点E的父结点与结点D是兄弟
答案:D
解析:
本题考查数据结构基础知识。
按照树的孩子-兄弟表示法,题图二叉输对应的树如下图所示。

结点E的父结点是C,结点C与D是兄弟关系。
按照树的孩子-兄弟表示法,题图二叉输对应的树如下图所示。
结点E的父结点是C,结点C与D是兄弟关系。
第7题:
用位移法计算超静定结构时,基本未知量的数目与()相等。
A多余约束数
B刚结点数
C铰结点数
D独立的结点位移数
B
略
第8题:
应用位移法求解超静定结构,与超静定次数无关,其基本未知量是刚性结点的角位移和结点的独立线位移。()
正确答案:对
第9题:
有限元分析的主要步骤有()
- A、前处理,包括载荷计算、建模、设置属性、划分网格等
- B、加载,包括约束自由度、施加集中载荷、表面载荷、耦合场载荷等
- C、求解,通过直接解法、稀疏矩阵解法、雅克比共轭梯度法等对有限元模型进行求解计算,默认方法为直接解法
- D、后处理,通过文件、图形、曲线等方式提取并检查分析结果
正确答案:A,B,C,D
第10题:
对结构进行有限元分析时,结构所受的载荷可以分为节点载荷和非节点载荷,对于()载荷需要进行载荷的移置处理。
正确答案:非节点