
软考高级
磁盘移臂调度算法中,______的主要缺陷是有高度局部化的倾向,会推迟某些请求服务,甚至引起饥饿。A.电梯调度算法B.先来先服务调度算法C.最短时间优先调度算法D.改进型电梯调度算法A.B.C.D.
题目
磁盘移臂调度算法中,______的主要缺陷是有高度局部化的倾向,会推迟某些请求服务,甚至引起饥饿。
A.电梯调度算法
B.先来先服务调度算法
C.最短时间优先调度算法
D.改进型电梯调度算法
A.
B.
C.
D.
相似问题和答案
第1题:
33、下列关于磁盘结构及磁盘调度的叙述中,哪一条是错误的?()
A.最短寻道时间优先(SSTF)调度算法可能导致饥饿现象
B.磁盘调度时,首先是移臂调度,然后是旋转调度
C.扫描算法不会导致磁臂黏着现象
D.磁盘的物理块号与磁盘地址可以相互转换
第2题:

B.②③⑧④⑥⑨①⑤⑦
C.①②③④⑤⑥⑦⑧⑨
D.②⑧③⑤⑦①④⑥⑨
第3题:
B. ②③⑧④⑥⑨①⑤⑦
C. ①②③④⑤⑥⑦⑧⑨
D. ②⑧③⑤⑦①④⑥⑨
第4题:
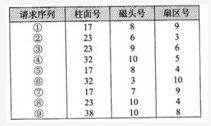
在磁盘调度管理中,应先进行移臂调度,再进行旋转调度。若磁盘移动臂位于22号柱面上,进程的请求序列如下表所示。若采用最短移臂调度算法,则系统的响应序列应为 (47) ,其平均移臂距离为 (48) 。
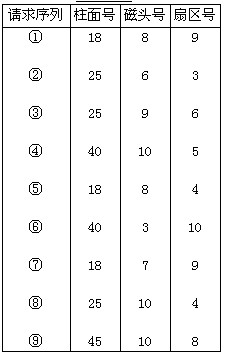
(47)
A.②⑧③④⑤①⑦⑥⑨
B.②⑧③⑤⑦①④⑥⑨
C.①②③④⑤⑥⑦⑧⑨
D.②③⑧④⑥⑨①⑤⑦
第5题:
A.先来先服务法
B.扫描法
C.电梯调度法
D.最短查找时间优先法
移臂调度算法中先来先服务算法是一种最为简单的调度算法,它按照输入输出请求到达的先后次序,逐一完成访问请求。所以这种调度算法需要频繁改变移臂的方向
第6题:
磁盘移臂调度算法(37)的主要缺陷是有高度局部化的倾向,会推迟某些请求服务,甚至引起饥饿。
A.FCFS
B.SSTF
C.SCAN
D.C-SCAN
解析:由本节对磁盘调度算法的介绍可直接得到本题的。访问磁盘的时间因素由3部分构成,它们是查找(查找磁道)时间、等待(旋转等待扇区)时间和数据传输时间,其中查找时间是决定因素。磁盘调度算法主要有FCFS、SSTF、SCAN、N-SCAN和C-SCAN。(1)FCFS又称先来先服务调度法,FCFS是一种最简单的磁盘调度算法,按先来后到次序服务,未做优化。这种算法的优点是公平、简单,且每个进程的请求都能依次得到处理,不会出现某一进程的请求长期得不到满足的情况。此算法未对寻道进行优化,致使平均寻道时间可能较长。(2)SSTF又称最短时间优先调度法,SSTF的磁盘调度算法选择这样的进程,其要求访问的磁道距当前磁头所在的磁道最近,以使每次寻道的时间最短。FCFS会引起读写头在盘面上的大范围移动,SSTF查找距离磁头最短(也就是查找时间最短)的请求作为下一次服务的对象。SSTF查找模式有高度局部化的倾向,会推迟一些请求的服务,甚至引起无限拖延(又称饥饿)。(3)SCAN又称电梯调度算法。SCAN算法不仅考虑到欲访问的磁道与当前磁道的距离,而且优先考虑在磁头前进方向上的最短查找时间优先算法,它排除了磁头在盘面局部位置上的往复移动。SCAN算法在很大程度上消除了SSTF算法的不公平性,但仍有利于对中间磁道的请求。SCAN算法的缺陷是当磁头由里向外移动过某一磁道时,恰有一进程请求访问此磁道,这时进程必须等待,磁头由里向外,然后再从外向里扫描完所有要访问的磁道后,才处理该进程的请求,致使该进程的请求被严重地推迟。(4)N-SCAN这是对SCAN算法的改良,是磁头改变方向时已到达的请求服务的SSTF算法(5)C-SCAN这是对SCAN算法的另一种改良,是单向服务的N步SCAN算法,C-SCAN算法规定磁头单向移动。C-SCAN算法彻底消除了对两端磁道请求的不公平。
第7题:
磁盘移臂调度算法中,(27)调度算法的主要缺陷是有高度局部化的倾向,会推迟某些请求服务,甚至引起饥饿。
A.最短时间优先(SSTF)
B.先来先服务(FCFS)
C.电梯(SCAN)
D.改进型电梯(CSCAN)
解析:最短时间优先(SSTF)调度算法通过查找距离当前磁头所在位置最短的请求作为下一次服务对象。该查找模式有高度局部化的倾向,会推迟某些请求服务,甚至引起无限拖延(饥饿)。
第8题:
在磁盘移臂调度算法中,()算法在返程时不响应进程访问磁盘的请求。
A.先来先服务
B.电梯调度
C.单向扫描
D.最短寻道时间优先
第9题:
在磁盘移臂调度算法中,______算法可能会随时改变移动臂的运动方向。
A.电梯调度和先来先服务
B.先来先服务和单向扫描
C.电梯调度和最短寻道时间优先
D.先来先服务和最短寻道时间优先
A.
B.
C.
D.
解析:在操作系统中常用的磁盘调度算法有:先来先服务、最短寻道时间优先、扫描算法、循环扫描算法等。其中,先来先服务是最简单的磁盘调度算法,它根据进程请求访问磁盘的先后次序进行调度,所以该算法可能会随时改变移动臂的运动方向。最短寻道时间优先算法根据进程请求,访问磁盘的寻道距离短的优先调度,因此该算法可能会随时改变移动臂的运动方向。电梯调度法的工作原理是先响应同方向(向内道或向外道方向)的请求访问,然后再响应反方向的请求访问,如同电梯的工作原理一样,因此该算法可能会随时改变移动臂的运动方向。单向扫描算法是电梯调度法的改进,该算法在返程时不响应请求访问,目的是为了解决电梯调度法带来的饥饿问题。