土建职称考试建筑工程类专业技术职务任职资格(中级)
平面机构中AB杆水平而OA杆铅直,若B点的速度vB≠0,加速度aB=0。则此瞬时OA杆的角速度、角加速度分别为()。A、ω=0,α≠0B、ω≠0,α≠0C、ω=0,α=0D、ω≠0,α=0
题目
平面机构中AB杆水平而OA杆铅直,若B点的速度vB≠0,加速度aB=0。则此瞬时OA杆的角速度、角加速度分别为()。
- A、ω=0,α≠0
- B、ω≠0,α≠0
- C、ω=0,α=0
- D、ω≠0,α=0
如果没有搜索结果,请直接 联系老师 获取答案。
如果没有搜索结果,请直接 联系老师 获取答案。
相似问题和答案
第1题:
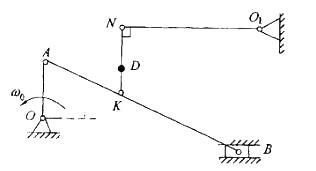
一平面机构曲柄长OA=r,以角速度ω0绕O轴逆时针向转动,在图示瞬时,摇杆O1N水平,连杆NK铅直。连杆上有一点D,其位置为DK=1/3NK,则此时D点的速度大小vD为:

答案:B
解析:
提示:AB杆瞬时平动,平面运动的NK杆瞬心为N点。
第2题:
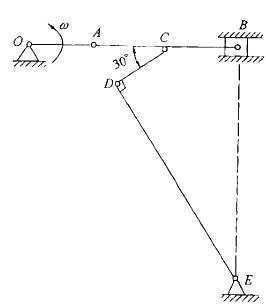
曲柄机构在其连杆AB的中点C与CD杆铰接,而CD杆又与DF杆铰接,DE杆可绕E点转动。曲柄OA以角速度ω= 8rad/s绕O点逆时针向转动。且OA = 25cm,DE=100cm。在图示瞬时,O、
A、B三点共在一水平线上,B、E两点在同一铅直线上,∠CDE=90°,则此时DE杆角速度ωDE的大小和方向为:

答案:B
解析:
提示:作平面运动的AB杆的瞬心为B,vc= vA/2,而ED定轴转动vD垂直于ED,且[vc]CD=[vD]CD。
第3题:
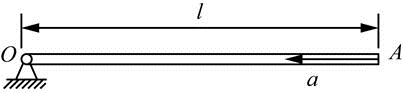
杆OA绕固定轴O转动,长为l,某瞬时杆端A点的加速度a如题52图所示。则该瞬时OA的角速度及角加速度为( )。

答案:C
解析:
第4题:
图示瞬时,作平面运动图形上A、B两点的加速度相等,即aA=aB,则该瞬时平面图形的角速度ω与角加速度α分别是:
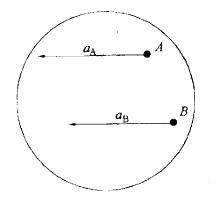
A. ω=0,α≠0
B. ω≠0,α=0
C. ω=0,α=0
D.ω≠0,α≠0
B. ω≠0,α=0
C. ω=0,α=0
D.ω≠0,α≠0
答案:C
解析:
提示:求平面图形上一点加速度的基点法,aB=aA+aBAn+aBAτ。
第5题:
均质长方形板由A、B两处的滑轮支承在光滑水平面上,如图7所示。初始板处于静止,若突然撤去B端的支承面,试判断下述各说法正确的是( )。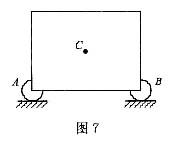 在撤去B端支承面的瞬时:
在撤去B端支承面的瞬时:
在撤去B端支承面的瞬时:
A、A点有水平向左的加速度
B、A点有水平向右的加速度
C、A点加速度方向铅直向上
D、A点加速度为零
B、A点有水平向右的加速度
C、A点加速度方向铅直向上
D、A点加速度为零
答案:A
解析:
板只受重力及A处约束力作用,两者都在铅垂方向。由质心运动定理知,质心C必沿铅垂线向下加速运动。由几何关系知,C向下运动,则点A必向左
第6题:
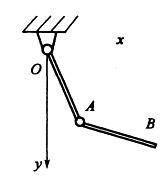
在图示定平面Oxy内,杆OA可绕轴O转动,杆AB在点A与杆OA铰接,即杆AB可绕点A转动。该系统称为双摆,其自由度数为:
A.1个
B.2个
C.3个
D.4个
B.2个
C.3个
D.4个
答案:B
解析:
在平面内自由运动的两杆件应有6个自由度,而0、A处有4个约束。
答案:B
答案:B
第7题:
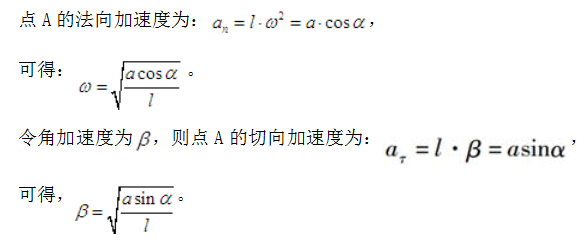
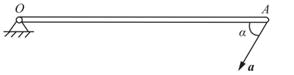
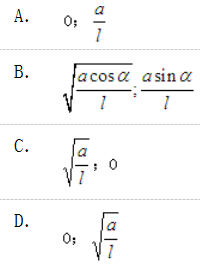
杆OA=l,绕固定轴O转动,某瞬时杆端A点的加速度a如图所示,则该瞬时杆OA的角速度及角加速度分别为:
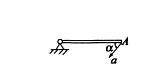

答案:B
解析:
根据定轴转动刚体上一点加速度与转动角速度、角加速度的关系:an=ω2l,at=al,而题中an= acosa,a1=asina。
第8题:
图示结构在水平杆AB的B端作用一铅直向下的力P,各杆自重不计,铰支座A的反力FA的作用线应该是:
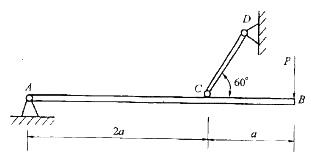
A. FA沿铅直线 B. FA沿水平线
C. FA沿
A. FA沿铅直线 B. FA沿水平线
C. FA沿
A、D连线 D. FA与水平杆AB间的夹角为30°
答案:D
解析:
提示:CD为二力杆。研究AB,应用三力汇交原理。
第9题:
均质杆OA,重P,长l,可在铅直平面内绕水平固定轴O转动。杆在图示铅直位置时静止,欲使杆转到水平位置,则至少要给杆的角速度是( )。


答案:B
解析:
运动过程中只有重力做功,根据动能定理得

第10题:
杆OA绕固定轴O转动,长为l。某瞬时杆端A点的加速度a如图所示,则该瞬时OA的角速度及角加速度为( )。
答案:B
解析: