
微机控制技术
通常,系统的稳定裕度的大小反映了系统的()。
题目
通常,系统的稳定裕度的大小反映了系统的()。
参考答案和解析
正确答案:稳定性
如果没有搜索结果,请直接 联系老师 获取答案。
相似问题和答案
第1题:
下列反映系统相对稳定性的量有()。
A.相位裕度
B.幅值裕度
C.超调量
D.稳态误差
正确答案:ABC
第2题:
稳定裕度是衡量一个开环稳定系统稳定程度的指标。()
此题为判断题(对,错)。
参考答案:错误
第3题:
对于最小相位系统,必须同时具有正幅值裕度和正相位裕度,才使闭环系统稳定。( )
此题为判断题(对,错)。
答案:√
第4题:
A.系统稳定,增益裕量为a
B.系统稳定,增益裕量为b
C.系统不稳定,负增益裕量为a
D.系统不稳定,负增益裕量为b
B.系统稳定,增益裕量为b
C.系统不稳定,负增益裕量为a
D.系统不稳定,负增益裕量为b
答案:C
解析:
第5题:
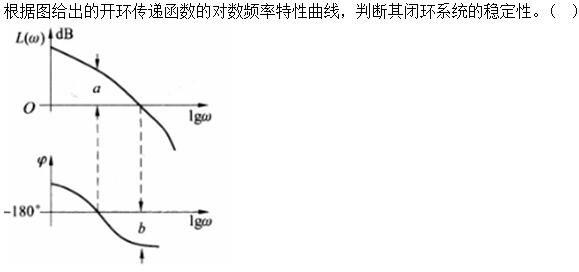
根据图中环路传递函数的对数频率特性曲线,判断其闭环系统的稳定性。( )
A. 系统稳定,增益裕量为a
B. 系统稳定,增益裕量为b
C. 系统不稳定,负增益裕量为a
D. 系统不稳定,负增益裕量为b
B. 系统稳定,增益裕量为b
C. 系统不稳定,负增益裕量为a
D. 系统不稳定,负增益裕量为b
答案:C
解析:
如图a)所示的不稳定系统,其相角裕度为负值,即<0,其幅值裕度0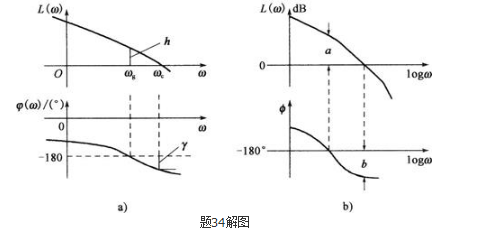
第6题:
若某最小相位系统的相角裕度γ>0°,则下列说法错误的是()。
A.不稳定
B.只有当幅值裕度kg1时才稳定
C.稳定
D.不能判用相角裕度判断系统的稳定性
正确答案:ABD
第7题:
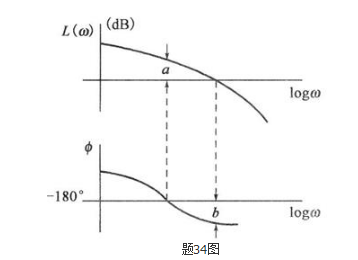
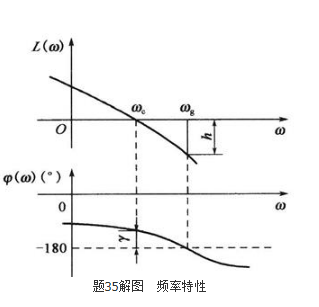
根据开环传递函数的对数坐标图判断其闭环系统的稳定性。( )
A. 系统稳定,增益裕量为a
B. 系统稳定,增益裕量为b
C. 系统不稳定,负增益裕量为a
D. 系统不稳定,负增益裕量为b
B. 系统稳定,增益裕量为b
C. 系统不稳定,负增益裕量为a
D. 系统不稳定,负增益裕量为b
答案:B
解析:
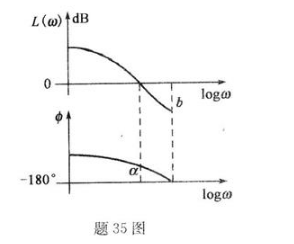
如题35解图所示。
根据解析图可知,

在数坐标图(伯德图)中,相角裕度表现为L(ωc)=0dB处的相角φ(ωc)与﹣180。水平线之间的角度差γ。对于题中所示的稳定系统,其对数幅值裕度h>0dB,相角裕度为正值,即γ>0。因此解析图中,幅值裕度(增益裕度)为b>0,相角裕度为a>0,该系统稳定。
根据解析图可知,
在数坐标图(伯德图)中,相角裕度表现为L(ωc)=0dB处的相角φ(ωc)与﹣180。水平线之间的角度差γ。对于题中所示的稳定系统,其对数幅值裕度h>0dB,相角裕度为正值,即γ>0。因此解析图中,幅值裕度(增益裕度)为b>0,相角裕度为a>0,该系统稳定。
第8题:
若某最小相位系统的相角裕度0γ>,则下列说法正确的是 ()。
A 、不稳定;
B 、只有当幅值裕度1g k >时才稳定;
C 、稳定;
D 、不能判用相角裕度判断系统的稳定性。
参考答案C
第9题:
系统的时域性能指为()。
A.稳定性
B.相位裕度
C.幅值裕度
D.稳态误差
B.相位裕度
C.幅值裕度
D.稳态误差
答案:D
解析:
时域性能指标包括稳态性能指标和动态性能指标。稳态性能指标为稳态误差;动态性能指标包括上升时间、峰值时间、调节时间和超调量。
第10题:
关于自动控制系统相角裕度和幅值裕度的描述,正确的是()。
A.相角裕度和幅值裕度是系统开环传递函数的频率指标,与闭环系统的动态性能密切相关
B.对于最小相角系统,要使系统稳定,要求相角裕度大于1,幅值裕度大于0
C.为保证系统具有一定的相对稳定性,相角裕度和幅值裕度越小越好
D.稳定裕度与相角裕度无关,与幅值裕度有关
B.对于最小相角系统,要使系统稳定,要求相角裕度大于1,幅值裕度大于0
C.为保证系统具有一定的相对稳定性,相角裕度和幅值裕度越小越好
D.稳定裕度与相角裕度无关,与幅值裕度有关
答案:A
解析:
稳定裕度。稳定系统的稳定程度,即相对稳定性,用相角(位)裕度和幅值裕度来表示。相角裕度和幅值裕度是系统开环频率指标,它与闭环系统的动态性能密切相关。对于最小相角系统,要使闭环系统稳定,要求相角裕度r>0,幅值裕度h>1。