
工学
相似问题和答案
第1题:
此题为判断题(对,错)。
第2题:
下列4个工业机器人的运动简图中,( )代表的是球坐标式机器人。
A.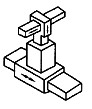
B.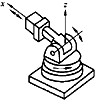
C.
D.
解析:本题考核要点是工业机器人的分类。要求依据给定的图示进行简单判别。球坐标式(代号RRP)又称极坐标式,机器人手臂的运动由一个直线运动和两个转动组成。
第3题:
工业爆破中常用的工业雷管有火雷管、_________、____________3大类。
第4题:
机械的连杆机构能把运动传递到较远的地方,在养路机械中常用于传递运动和操纵装置。
此题为判断题(对,错)。
第5题:
2014年,我国工业机器人销量达到5.6万台,在2013年就已超过()成为全球第一大机器人生产国。
A日本
B美国
C德国
D韩国
第6题:
A、位置
B、速度
C、位移
D、运动轨迹
第7题:
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。
A.3
B.4
C.5
D.6
第8题:
A、弧焊机器人
B、点焊机器人
C、搬运机器人
D、装配机器人
第9题:
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。 A.3B.4C.5 D.6
第10题:
拉伸(压缩)变形其横截面上的应力垂直于横截面,且在横截面上均匀分布,叫做正应力。
正确答案:正确